









Radio Nowinki
DS3 "Bartek"
ul. Skarżyńskiego 7/6
31-866 Kraków
tel.: 12 648-25-71
e-mail: nowinki@pk.edu.pl
Obserwuj nas na:
![]()

ZOSTAŃ JEDNYM Z NAS !!
Już teraz zgłoś się do nas i naucz się radiowego fachu. Zdobądź cenne doświadczenie i staż pracy. Napisz na nasz adres e-mail lub na FB lub przyjdź w poniedziałek o 20:00 na spotkanie radiowe w naszej siedzibie.

![]()




Jej autorem jest mgr inż. Tomasz Talarczyk, absolwent automatyki i robotyki na Wydziale Mechanicznym Politechniki Krakowskiej. W kategorii prac dyplomowych magisterskich zdobył on II nagrodę za projekt, którego celem jest zwiększenie bezpieczeństwa obszarów infrastruktury portowej oraz statków.
Za nami kolejna edycja konkursu „Młodzi innowacyjni” organizowanego przez Sieć Badawczą Łukasiewicz – Przemysłowy Instytut Automatyki i Pomiarów PIAP. Po raz kolejny w gronie nagrodzonych osób znalazł się absolwent Politechniki Krakowskiej. Za najlepszą pracę dyplomową z dziedziny automatyki, robotyki i pomiarów II nagrodę otrzymał mgr inż. Tomasz Talarczyk. Jest on absolwentem Wydziału Mechanicznego PK, a obecnie doktorantem i pracownikiem tego wydziału.
Nagrodzona praca „Projekt i budowa hybrydowego pojazdu podwodnego” stanowi kontynuację badań dotyczących biomimetycznych pojazdów podwodnych, realizowanych z sukcesami od wielu lat w Katedrze Inżynierii i Automatyzacji Produkcji WM PK. Warto przypomnieć choćby rok 2010, kiedy to w konkursie „Młodzi innowacyjni” I nagrodę w kategorii prac magisterskich zdobyła „CyberRyba – podwodny robot mobilny”. Jej współautorem był dr inż. Marcin Malec, który obecnie jako promotor sprawował pieczę nad pracą dyplomową mgr. inż. Tomasza Talarczyka. To właśnie dr inż. Marcin Malec, a także dr inż. Marcin Morawski od ponad 10 lat specjalizują się w temacie podwodnych robotów mobilnych i intensywnie rozwijają ten obszar badawczy.
Praca dyplomowa mgr. inż. Tomasza Talarczyka jest jedną z trzech powstałych w ramach projektu „Ławica hybrydowych pojazdów podwodnych z dwutorowym systemem komunikacji”. Przedsięwzięcie finansowane jest z FutureLab PK i stanowi kontynuację działań związanych z „CyberRybą”. Pod opieką dr. inż. Marcina Malca i dr. inż. Marcina Morawskiego realizowało go trzech studentów z kierunku automatyka i robotyka. Projekt uzyskał zgłoszenia patentowe, zwyciężył w Wydziałowej Sesji Studenckich Kół Naukowych, a także zaowocował powstaniem trzech prac magisterskich. Oprócz pracy mgr. inż. Tomasza Talarczyka w ramach projektu „Ławica hybrydowych pojazdów podwodnych z dwutorowym systemem komunikacji” powstała również praca mgr. inż. Marcina Sroki zatytułowana „Wykonanie systemu sterowania podwodnego pojazdu hybrydowego”, a także praca mgr. inż. Krystiana Zapotocznego pt. „Moduł do bezprzewodowego ładowania akumulatorów pojazdu podwodnego”.
W pracy mgr. inż. Tomasza Talarczyka zostały zaproponowane rozwiązania związane z rozwojem technologii pojazdów biomimetycznych opartych m.in. na konstrukcji „CyberRyby”. Wg autora nagrodzonej pracy system monitorowania linii brzegowej akwenów mógłby odbywać się z wykorzystaniem ławicy podwodnych pojazdów hybrydowych. Projekt mgr. inż. Tomasza Talarczyka ma na celu stworzenie i przetestowanie prototypów rozwiązań, które pozwolą zwiększyć bezpieczeństwo obszarów infrastruktury portowej. – Ławica współpracujących pojazdów podwodnych będzie wspierać realizację zadań związanych z monitoringiem linii brzegowej – tłumaczy Tomasz Talarczyk.
Hybrydowy system napędowy pojazdu podwodnego realizuje dwa tryby ruchu. Jeden z nich wykorzystuje pędniki śrubowe. Jest on szybki, ale i głośny. Drugi, czyli biomimetyczny system napędowy oparty na oscylacyjnym ruchu dwóch niezależnie działających płetw bocznych i zbiorniku balastowym jest znacznie wolniejszy, ale i zdecydowanie cichszy. Warto zauważyć, że pojazdy cechuje system bezprzewodowego ładowania.
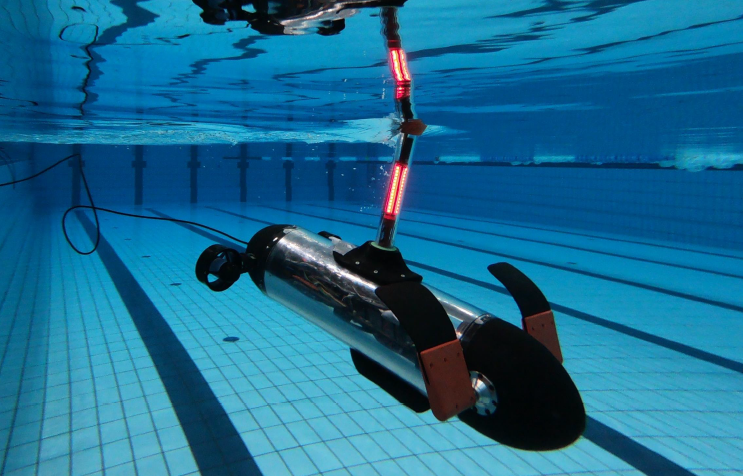
Między pojazdami następuje wymiana informacji z wykorzystaniem sygnałów świetlnych i radiowych. Komunikacja pojazdów pozwala monitorować większy obszar. – Dwutorowy system komunikacji pojazdu pływającego ma za zadanie połączyć ze sobą zalety układu komunikacji radiowej i optycznej. Rozwiązanie umożliwi wymianę danych pomiędzy elementami ławicy pojazdów pływających pod wodą oraz na powierzchni w obszarze wykrywania źródła sygnału radiowego – tłumaczy mgr inż. Tomasz Talarczyk.
Za pomocą tego systemu można przypisywać role, definiować zadania główne i poboczne wykorzystując np. kolory masztów. Użycie różnych barw ułatwia poruszanie się pojazdów w określonym szyku np. ptasiego klucza. Jak dodaje autor nagrodzonej pracy: – Wykorzystanie obrotowej kamery i programowalnych diod RGB pozwala na realizację komunikacji optycznej w oparciu o np. kod Morse'a. Natomiast niezależna konfiguracja kolorów poszczególnych diod LED przy współpracy z kolorową kamerą o dużej rozdzielczości pozwala na realizację kanału transmisji świetlnej z wyższą przepustowością w porównaniu do kodu Morse'a.
Projekt jest niezwykle rozbudowany. Pierwszy etap związany jest z przetestowaniem trzech głównych elementów pojazdu, takich jak: napęd hybrydowy, komunikacja świetlna oraz system bezprzewodowego ładowania. Warto podkreślić, że rozwiązania wykorzystane w pojazdach doczekały się czterech zgłoszeń patentowych w Urzędzie Patentowym Rzeczypospolitej Polskiej.
Projekt mgr. inż. Tomasza Talarczyka, czy wspomniana wcześniej „CyberRyba” to nie jedyne prace studentów PK, które zostały nagrodzone w konkursie „Młodzi innowacyjni”. W 2011 roku I nagrodę w kategorii prac inżynierskich zdobył bowiem „Gąsiennicowy robot inspekcyjny R-Bot” autorstwa Jakuba Hajkusia.
Facebook Instagram Poliechnika Krakowska GALERIA RADIOWA Nasza Politechnika Klub Kwadrat © Copyright 2011




